 |
|
 |
|
|
Humans are capable of performing impressive variety of movements that range from simple movements, such as looking at an object of interest by turning the head and eyes, to complex and intricate series of movements, such as executing a tripple axle on ice. These movements are improved over an extensive period of practice. This process, known as Motor Learning involves executing movements, identifying errors, and correcting those errors in subsequent movements. Our research is driven by the curiosity of understanding and modelling systems that can perform and learn as humans. Motor learning affects many different
components of sensory and motor processing. Motor Control
involves both simple movement trajectories and complex series of
movements in which multiple muscles and joints need to be controlled in
a precise manner. Motor learning refines simple movements by altering
the magnitude and timing of muscular force generation. For complex
movements, motor learning is required to select and coordinate the
appropriate muscular contractions. 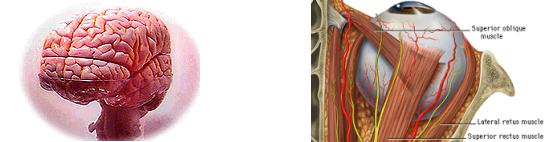 One best understood movement system is the Eye Movements. We are interested in modelling and control of human ocular system. There is a direct link between the role played by Visual Attention and Eye Movements. Attention contributes to the control of saccades, namely, attention is allocated to the chosen target shortly before the saccade is made to look at it. Going one step further, we are also interested
in Visual Processing System. The importance of vision in our daily
lives, is reflected in the fact that we have large and highly mobile
eyes. But our reliance on vision is also evident in the large amount of
brain devoted to visual processing. Modelling of fresh water turtle Visual
Cortex to broaden our understanding, is one of our major topics of
interest. The possible cell types in the visual cortex, can be defined
in terms of the functional influence of their synapses (excitatory or
inhibitory); anatomical features (dendrites, stellate or pyramidal );
intrinsic membrane properties (fast-spiking, regular- spiking, bursting
etc.); or patterns of connectivity. Most notably, inhibitory and
excitatory neurons compose two main distinct groups. 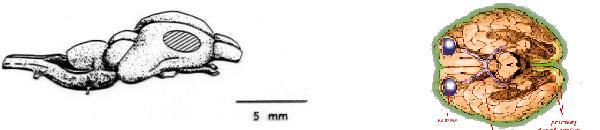 |
|
|
Our research in Mobile robotics enables us to understand how a machine can emulate the behavioral, perceptual, and cognitive skills of humans, and to investigate how an artifact can successfully interact, in real time, with an uncertain, dynamic environment . A key component to successful navigation is reliable perception of objects (obstacles) that may impede motion. The XR4000 robot in our lab comprises a set of ultrasonic sensors, a laser range finder, two LCD cameras, and a set of tactile sensors to help detecting obstacles. These sensors give reasonably good range estimates, and the data can be improved by integrating measurements over time to reduce sensor noise. Deciding how to move is often divided into local navigation (obstacle avoidance), for reacting quickly, and global, map-based navigation, for planning good routes. We investigate Sensor Fusion techniques to achive these goals. |
 |
|
Computing Facilities:
|
|
Software Tools:
|
|
CBCIS home | About | Personnel | Research | Publications | Events | Links |
|
| Sign our guestbook | Usage statistics | |
|
About this site.. © 2007 Texas Tech University Last modified:Thursday, 11-Jan-2007 00:49:05 CST Comments to webmaster |
|